News and Talks
- NEW(2026 May) TWIST2 is selected as Oral Presentation at ICRA 2026.
- (2026 Jan) TWIST2 and GMR are accepted by ICRA 2026.
- (2026 Jan) Start the internship at the Helix AI team of Figure AI.
- (2025 Dec) TWIST2 is fully open-sourced here.
- (2025 Nov) TWIST2 is released.
- (2025 Oct) ResMimic is released.
- (2025 Sep) TWIST is fully open-sourced here.
- (2025 Sep) VisualMimic is released.
- (2025 Aug) GMR is fully open-sourced here.
- (2025 Aug) TWIST and BEHAVIOR Robot Suite are accepted by CoRL 2025.
- (2025 Jun) X-Capture and FVP are accepted by ICCV 2025.
- (2025 Jun) Invited talk at RoboPapers podcast.
- (2025 Jun) iDP3 and LCP are accepted by IROS 2025.
- (2025 Jun) TWIST wins the Best Demo Award at CVPR Workshop on Humanoid Agents.
- (2025 May) TWIST is released and featured by Brett Adcock, TechXplore, and The Humanoid Hub.
(2025 Dec) Building Data for Humanoid Intelligence
(2025 Sep) GMR: General Motion Retargeting
Publications
Filter by: / / / /
Learning Humanoid Navigation from Human Data
Weizhuo Wang, Yanjie Ze, C. Karen Liu, Monroe Kennedy
arXiv, 2026
project page / arXiv / twitter / bibtex
Weizhuo Wang, Yanjie Ze, C. Karen Liu, Monroe Kennedy
arXiv, 2026
project page / arXiv / twitter / bibtex
TWIST2: Scalable, Portable, and Holistic Humanoid Data Collection System
Yanjie Ze, Siheng Zhao, Weizhuo Wang, Angjoo Kanazawa†, Rocky Duan†, Pieter Abbeel†, Guanya Shi†, Jiajun Wu†, C. Karen Liu†
International Conference on Robotics and Automation (ICRA), 2026 (Oral)
project page / arXiv / code / twitter / bibtex /
Yanjie Ze, Siheng Zhao, Weizhuo Wang, Angjoo Kanazawa†, Rocky Duan†, Pieter Abbeel†, Guanya Shi†, Jiajun Wu†, C. Karen Liu†
International Conference on Robotics and Automation (ICRA), 2026 (Oral)
project page / arXiv / code / twitter / bibtex /
ResMimic: From General Motion Tracking to Humanoid Whole-Body Loco-Manipulation via Residual Learning
Siheng Zhao, Yanjie Ze, Yue Wang, C. Karen Liu†, Pieter Abbeel†, Guanya Shi†, Rocky Duan†
arXiv, 2025
project page / arXiv / twitter / bibtex
Siheng Zhao, Yanjie Ze, Yue Wang, C. Karen Liu†, Pieter Abbeel†, Guanya Shi†, Rocky Duan†
arXiv, 2025
project page / arXiv / twitter / bibtex
Retargeting Matters: General Motion Retargeting for Humanoid Motion Tracking
Joao Pedro Araujo*, Yanjie Ze*, Pei Xu*, Jiajun Wu†, C. Karen Liu†
International Conference on Robotics and Automation (ICRA), 2026
project page / arXiv / blog / code / twitter / bibtex /
Joao Pedro Araujo*, Yanjie Ze*, Pei Xu*, Jiajun Wu†, C. Karen Liu†
International Conference on Robotics and Automation (ICRA), 2026
project page / arXiv / blog / code / twitter / bibtex /
VisualMimic: Visual Humanoid Loco-Manipulation via Motion Tracking and Generation
Shaofeng Yin*, Yanjie Ze*, Hong-Xing Yu, C. Karen Liu†, Jiajun Wu†
arXiv, 2025
project page / arXiv / blog / code / twitter / bibtex /
Shaofeng Yin*, Yanjie Ze*, Hong-Xing Yu, C. Karen Liu†, Jiajun Wu†
arXiv, 2025
project page / arXiv / blog / code / twitter / bibtex /
TWIST: Teleoperated Whole-Body Imitation System
Yanjie Ze*, Zixuan Chen*, João Pedro Araújo*, Zi-ang Cao, Xue Bin Peng, Jiajun Wu†, C. Karen Liu†
Conference on Robot Learning (CoRL), 2025
CVPR Workshop on Humanoid Agents, 2025 (Best Demo Award)
project page / arXiv / blog / code / twitter / poster / bibtex /
Yanjie Ze*, Zixuan Chen*, João Pedro Araújo*, Zi-ang Cao, Xue Bin Peng, Jiajun Wu†, C. Karen Liu†
Conference on Robot Learning (CoRL), 2025
CVPR Workshop on Humanoid Agents, 2025 (Best Demo Award)
project page / arXiv / blog / code / twitter / poster / bibtex /
BEHAVIOR Robot Suite: Streamlining Real-World Whole-Body Manipulation for Everyday Household Activities
Yunfan Jiang, Ruohan Zhang, Josiah Wong, Chen Wang, Yanjie Ze, Hang Yin, Cem Gokmen, Shuran Song, Jiajun Wu, Li Fei-Fei
Conference on Robot Learning (CoRL), 2025
project page / arXiv / code / bibtex /
Yunfan Jiang, Ruohan Zhang, Josiah Wong, Chen Wang, Yanjie Ze, Hang Yin, Cem Gokmen, Shuran Song, Jiajun Wu, Li Fei-Fei
Conference on Robot Learning (CoRL), 2025
project page / arXiv / code / bibtex /
4D Visual Pre-training for Robot Learning
Chengkai Hou, Yanjie Ze, Yankai Fu, Zeyu Gao, Songbo Hu, Yue Yu, Shanghang Zhang, Huazhe Xu
International Conference on Computer Vision (ICCV), 2025
project page / arXiv / bibtex
Chengkai Hou, Yanjie Ze, Yankai Fu, Zeyu Gao, Songbo Hu, Yue Yu, Shanghang Zhang, Huazhe Xu
International Conference on Computer Vision (ICCV), 2025
project page / arXiv / bibtex
X-Capture: An Open-Source Portable Device for Multi-Sensory Learning
Samuel Clarke, Suzannah Wistreich, Yanjie Ze, Jiajun Wu
International Conference on Computer Vision (ICCV), 2025
project page / arXiv / bibtex
Samuel Clarke, Suzannah Wistreich, Yanjie Ze, Jiajun Wu
International Conference on Computer Vision (ICCV), 2025
project page / arXiv / bibtex
Learning Smooth Humanoid Locomotion through Lipschitz-Constrained Policies
Zixuan Chen*, Xialin He*, Yen-Jen Wang*, Qiayuan Liao, Yanjie Ze, Zhongyu Li, S. Shankar Sastry, Jiajun Wu, Koushil Sreenath, Saurabh Gupta, Xue Bin Peng
International Conference on Intelligent Robots and Systems (IROS), 2025 (Oral)
project page / arXiv / code / bibtex /
Zixuan Chen*, Xialin He*, Yen-Jen Wang*, Qiayuan Liao, Yanjie Ze, Zhongyu Li, S. Shankar Sastry, Jiajun Wu, Koushil Sreenath, Saurabh Gupta, Xue Bin Peng
International Conference on Intelligent Robots and Systems (IROS), 2025 (Oral)
project page / arXiv / code / bibtex /
Generalizable Humanoid Manipulation with 3D Diffusion Policies
Yanjie Ze, Zixuan Chen, Wenhao Wang, Tianyi Chen, Xialin He, Ying Yuan, Xue Bin Peng, Jiajun Wu
International Conference on Intelligent Robots and Systems (IROS), 2025 (Oral)
project page / arXiv / code (learning) / code (teleop) / twitter / bibtex / &
&

Yanjie Ze, Zixuan Chen, Wenhao Wang, Tianyi Chen, Xialin He, Ying Yuan, Xue Bin Peng, Jiajun Wu
International Conference on Intelligent Robots and Systems (IROS), 2025 (Oral)
project page / arXiv / code (learning) / code (teleop) / twitter / bibtex /
&
Catch It! Learning to Catch in Flight with Mobile Dexterous Hands
Yuanhang Zhang*, Tianhai Liang*, Zhenyang Chen, Yanjie Ze, Huazhe Xu
International Conference on Robotics and Automation (ICRA), 2025
CoRL Workshop on Dexterous Manipulation, 2024 (Best Paper Nomination)
project page / arXiv / code / bibtex /
Yuanhang Zhang*, Tianhai Liang*, Zhenyang Chen, Yanjie Ze, Huazhe Xu
International Conference on Robotics and Automation (ICRA), 2025
CoRL Workshop on Dexterous Manipulation, 2024 (Best Paper Nomination)
project page / arXiv / code / bibtex /
Diffusion Reward: Learning Rewards via Conditional Video Diffusion
Tao Huang*, Guangqi Jiang*, Yanjie Ze, Huazhe Xu
European Conference on Computer Vision (ECCV), 2024
project page / arXiv / code / bibtex /
Tao Huang*, Guangqi Jiang*, Yanjie Ze, Huazhe Xu
European Conference on Computer Vision (ECCV), 2024
project page / arXiv / code / bibtex /
Learning Visual Quadrupedal Loco-Manipulation from Demonstrations
Zhengmao He, Kun Lei, Yanjie Ze, Koushil Sreenath, Zhongyu Li, Huazhe Xu
International Conference on Intelligent Robots and Systems (IROS), 2024 (Oral)
project page / arXiv / bibtex
Zhengmao He, Kun Lei, Yanjie Ze, Koushil Sreenath, Zhongyu Li, Huazhe Xu
International Conference on Intelligent Robots and Systems (IROS), 2024 (Oral)
project page / arXiv / bibtex
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations
Yanjie Ze*, Gu Zhang*, Kangning Zhang, Chenyuan Hu, Muhan Wang, Huazhe Xu
Robotics: Science and Systems (RSS), 2024 (Oral)
project page / arXiv / code / twitter / bibtex /
Yanjie Ze*, Gu Zhang*, Kangning Zhang, Chenyuan Hu, Muhan Wang, Huazhe Xu
Robotics: Science and Systems (RSS), 2024 (Oral)
project page / arXiv / code / twitter / bibtex /
Generalizable Visual Reinforcement Learning with Segment Anything Model
Ziyu Wang*, Yanjie Ze*, Yifei Sun, Zhecheng Yuan, Huazhe Xu
arXiv, 2023
project page / arXiv / code / bibtex /
Ziyu Wang*, Yanjie Ze*, Yifei Sun, Zhecheng Yuan, Huazhe Xu
arXiv, 2023
project page / arXiv / code / bibtex /
Unleashing the Power of Pre-trained Language Models for Offline Reinforcement Learning
Ruizhe Shi*, Yuyao Liu*, Yanjie Ze, Simon S. Du, Huazhe Xu
International Conference on Learning Representations (ICLR), 2024
project page / arXiv / code / bibtex /
Ruizhe Shi*, Yuyao Liu*, Yanjie Ze, Simon S. Du, Huazhe Xu
International Conference on Learning Representations (ICLR), 2024
project page / arXiv / code / bibtex /
DrM: Mastering Visual Reinforcement Learning through Dormant Ratio Minimization
Guowei Xu*, Ruijie Zheng*, Yongyuan Liang*, Xiyao Wang, Zhecheng Yuan, Tianying Ji, Yu Luo, Xiaoyu Liu, Jiaxin Yuan, Pu Hua, Shuzhen Li, Yanjie Ze, Hal Daumé III, Furong Huang, Huazhe Xu
International Conference on Learning Representations (ICLR), 2024 (Spotlight)
project page / arXiv / code / bibtex /
Guowei Xu*, Ruijie Zheng*, Yongyuan Liang*, Xiyao Wang, Zhecheng Yuan, Tianying Ji, Yu Luo, Xiaoyu Liu, Jiaxin Yuan, Pu Hua, Shuzhen Li, Yanjie Ze, Hal Daumé III, Furong Huang, Huazhe Xu
International Conference on Learning Representations (ICLR), 2024 (Spotlight)
project page / arXiv / code / bibtex /
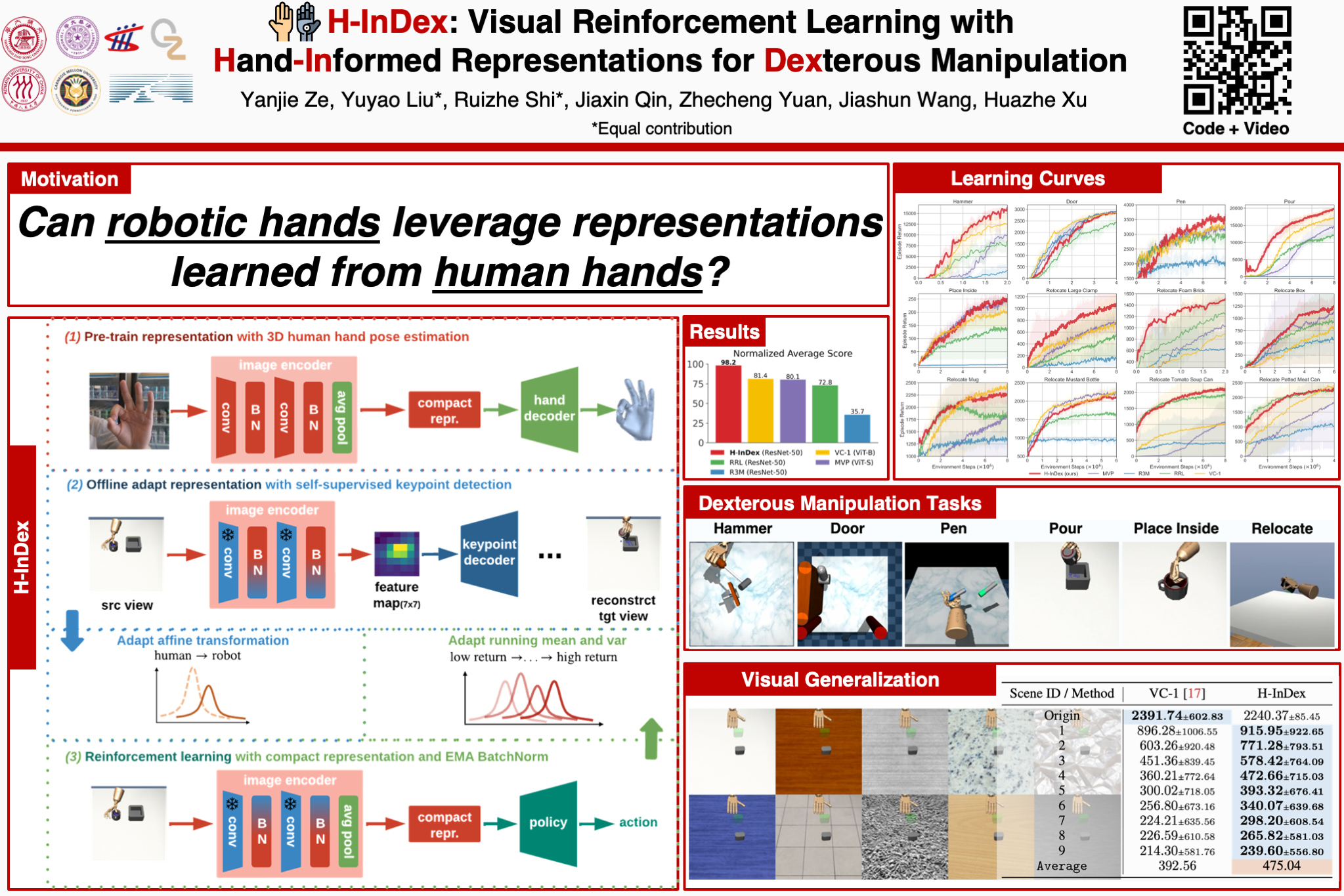
H-InDex: Visual Reinforcement Learning with Hand-Informed Representations for Dexterous Manipulation
Yanjie Ze, Yuyao Liu*, Ruizhe Shi*, Jiaxin Qin, Zhecheng Yuan, Jiashun Wang, Huazhe Xu
Conference on Neural Information Processing Systems (NeurIPS), 2023
project page / arXiv / code / poster / bibtex /
Yanjie Ze, Yuyao Liu*, Ruizhe Shi*, Jiaxin Qin, Zhecheng Yuan, Jiashun Wang, Huazhe Xu
Conference on Neural Information Processing Systems (NeurIPS), 2023
project page / arXiv / code / poster / bibtex /
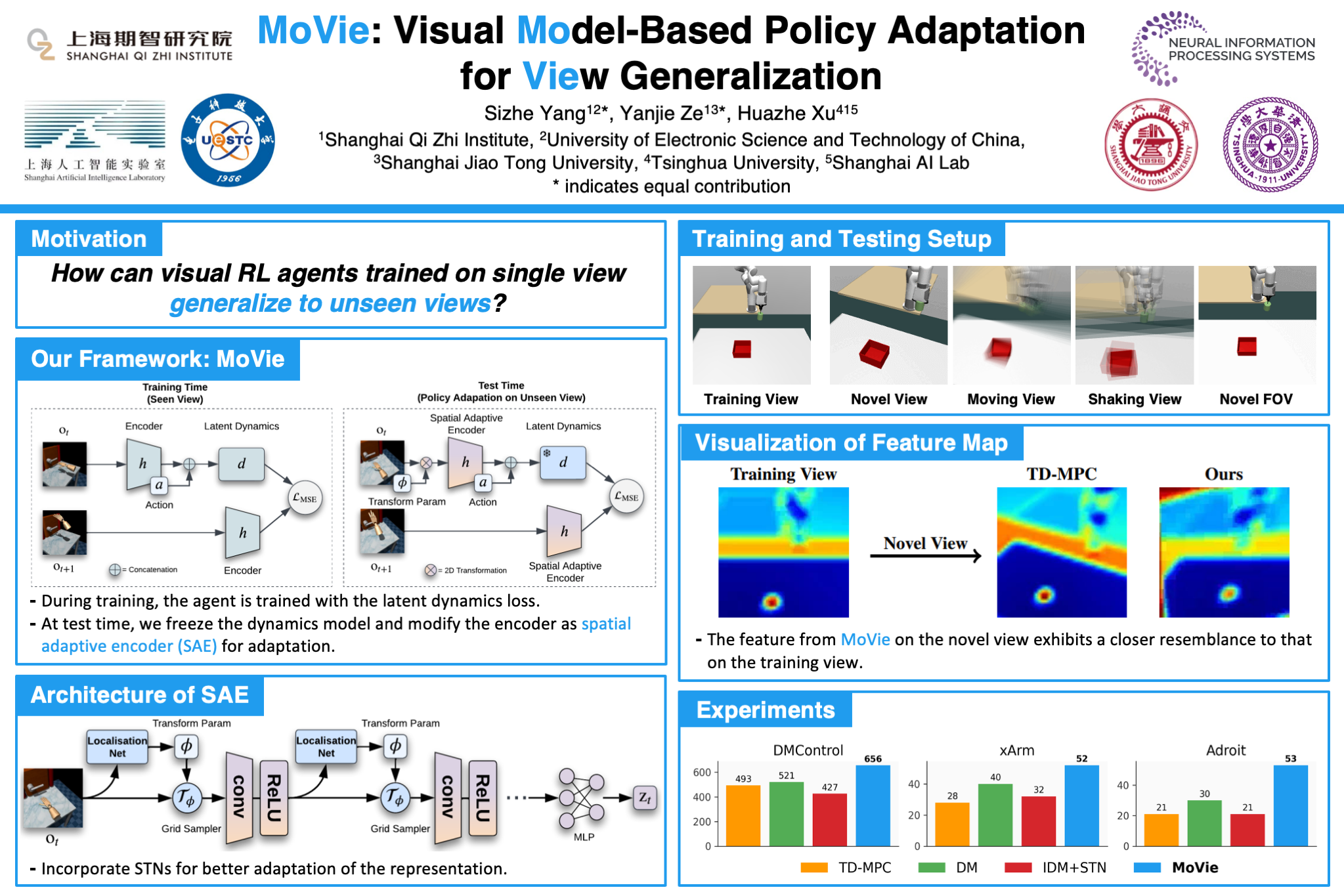
MoVie: Visual Model-Based Policy Adaptation for View Generalization
Sizhe Yang*, Yanjie Ze*, Huazhe Xu
Conference on Neural Information Processing Systems (NeurIPS), 2023
project page / arXiv / code / poster / bibtex /
Sizhe Yang*, Yanjie Ze*, Huazhe Xu
Conference on Neural Information Processing Systems (NeurIPS), 2023
project page / arXiv / code / poster / bibtex /
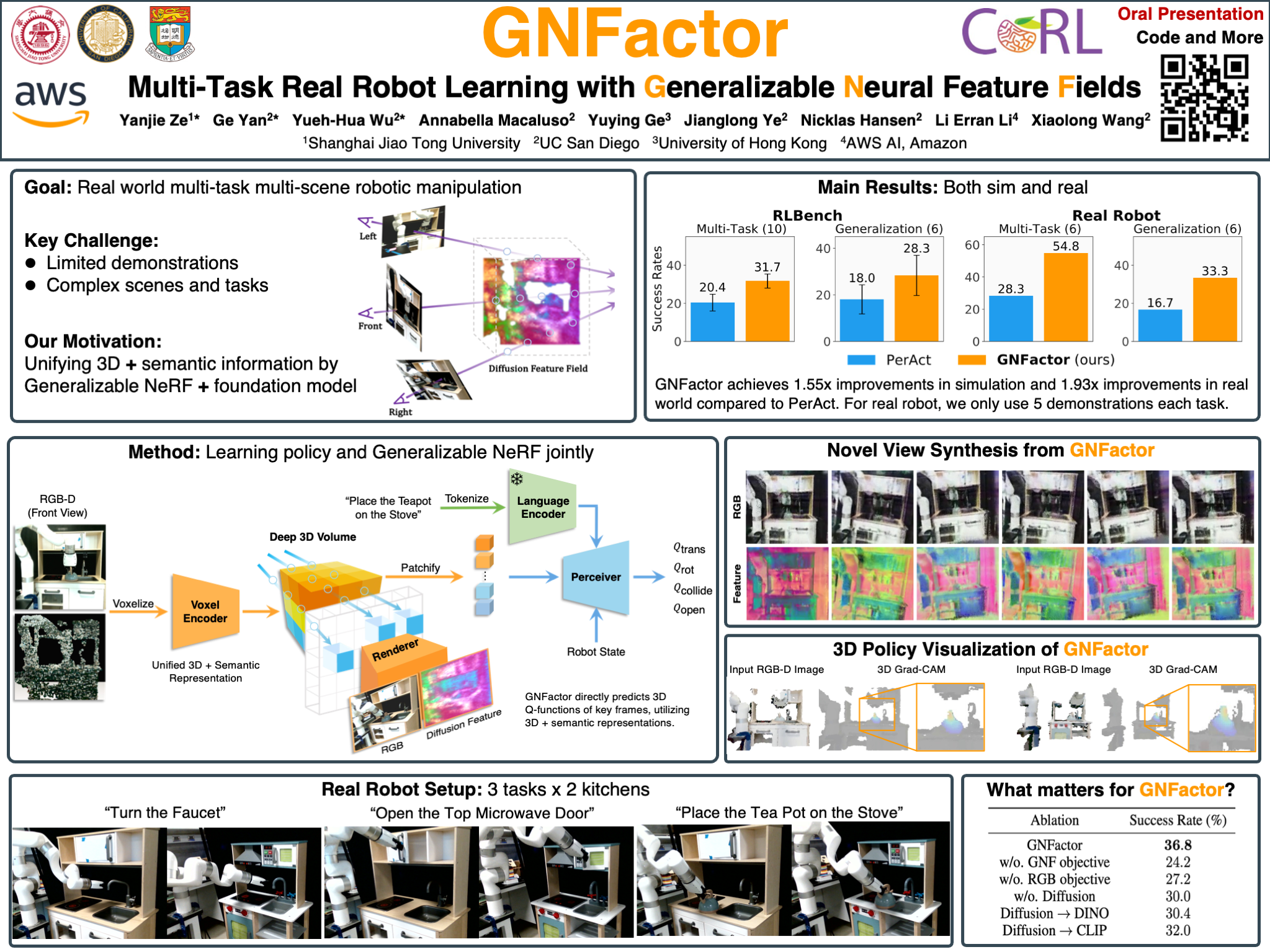
GNFactor: Multi-Task Real Robot Learning with Generalizable Neural Feature Fields
Yanjie Ze*, Ge Yan*, Yueh-Hua Wu*, Annabella Macaluso, Yuying Ge, Jianglong Ye, Nicklas Hansen, Li Erran Li, Xiaolong Wang
Conference on Robot Learning (CoRL), 2023 (Oral)
project page / arXiv / code / poster / bibtex /
Yanjie Ze*, Ge Yan*, Yueh-Hua Wu*, Annabella Macaluso, Yuying Ge, Jianglong Ye, Nicklas Hansen, Li Erran Li, Xiaolong Wang
Conference on Robot Learning (CoRL), 2023 (Oral)
project page / arXiv / code / poster / bibtex /

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
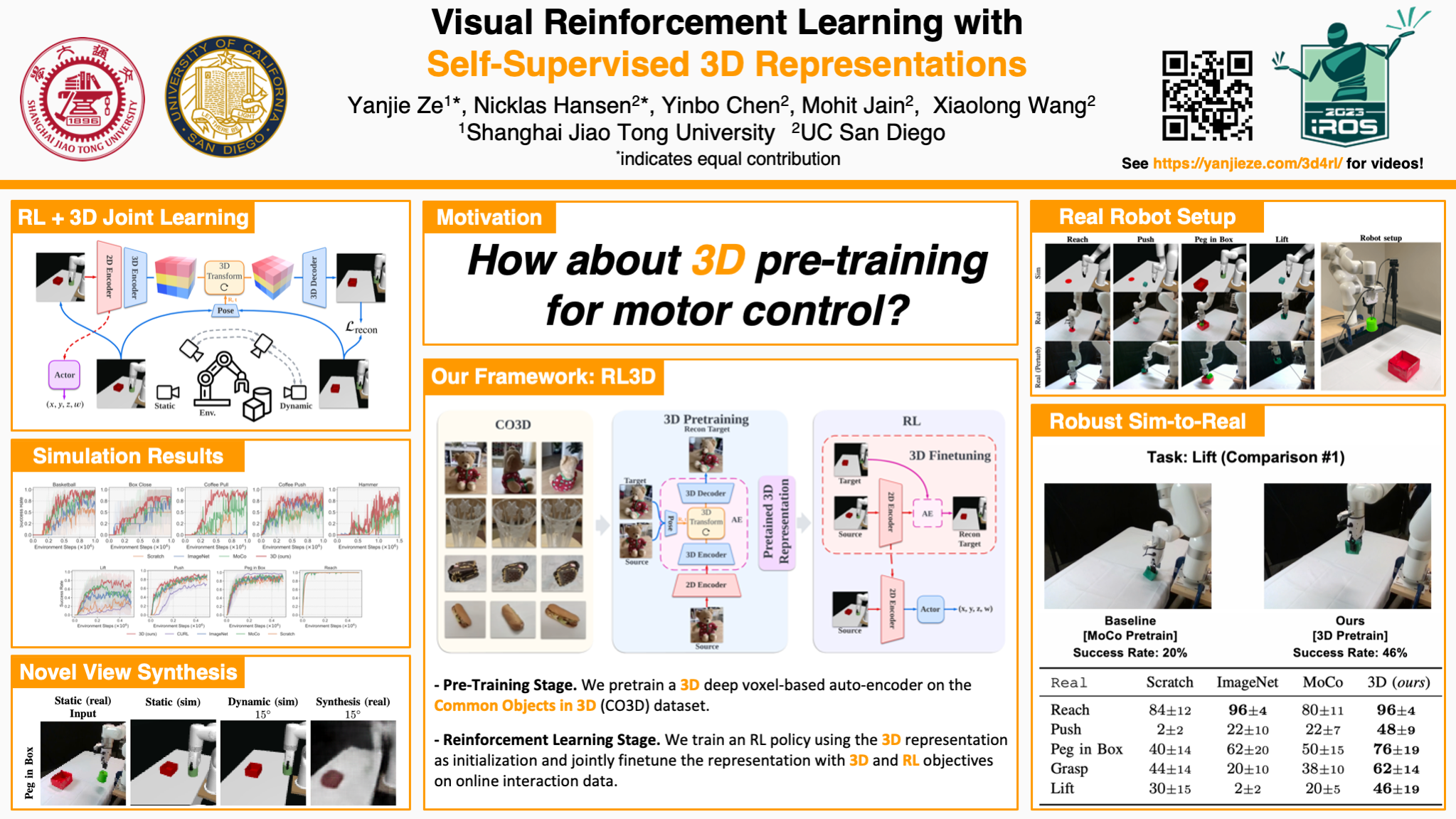
Visual Reinforcement Learning with Self-Supervised 3D Representations
Yanjie Ze*, Nicklas Hansen*, Yinbo Chen, Mohit Jain, Xiaolong Wang
Robotics and Automation Letters (RA-L), 2023
International Conference on Intelligent Robots and Systems (IROS), 2023 (Oral)
project page / arXiv / code / poster / bibtex /
Yanjie Ze*, Nicklas Hansen*, Yinbo Chen, Mohit Jain, Xiaolong Wang
Robotics and Automation Letters (RA-L), 2023
International Conference on Intelligent Robots and Systems (IROS), 2023 (Oral)
project page / arXiv / code / poster / bibtex /
{kind=link}
DPMAC: Differentially Private Communication for Cooperative Multi-Agent Reinforcement Learning
Canzhe Zhao*, Yanjie Ze*, Jing Dong, Baoxiang Wang, Shuai Li
International Joint Conference on Artificial Intelligence (IJCAI), 2023
arXiv / code / bibtex /
Canzhe Zhao*, Yanjie Ze*, Jing Dong, Baoxiang Wang, Shuai Li
International Joint Conference on Artificial Intelligence (IJCAI), 2023
arXiv / code / bibtex /
Differentially Private Temporal Difference Learning with Stochastic Nonconvex-Strongly-Concave Optimization
Canzhe Zhao, Yanjie Ze, Jing Dong, Baoxiang Wang, Shuai Li
International Conference on Web Search and Data Mining (WSDM), 2023
arXiv / code / bibtex /
Canzhe Zhao, Yanjie Ze, Jing Dong, Baoxiang Wang, Shuai Li
International Conference on Web Search and Data Mining (WSDM), 2023
arXiv / code / bibtex /
UKPGAN: A General Self-Supervised Keypoint Detector
Yang You, Wenhai Liu, Yanjie Ze, YongLu Li, Weiming Wang, Cewu Lu
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
project page / arXiv / code / bibtex /
Yang You, Wenhai Liu, Yanjie Ze, YongLu Li, Weiming Wang, Cewu Lu
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
project page / arXiv / code / bibtex /
Software
I maintain a collection of open-source projects on GitHub.
GMR: General Motion Retargeting
Real-time motion retargeting for versatile humanoid robots
Open-Source Software
blog / code /
Real-time motion retargeting for versatile humanoid robots
Open-Source Software
blog / code /